Planning During the Red and Green Phases
These supplemental movies and figures correspond to Example 2 of the following paper:
Planning During the Red and Green Phases:
These supplemental figures correspond to Example 2 in the Optimal Driving manuscript.
- Planning begins at \(t = T_R\).
- Driver knows \(T_R\) and \(T_G\) with certainty.
- Red light duration, \(D_R = 60s\).
- Objective preferences: \((c_1,c_2,c_3) = (1/3, 1/3, 1/3)\).
Feedback Controls and Trajectory Tracing:
- Traces two optimal trajectories starting from \((d,v) = (d_0, v_0)\).
- Black circle: \((d_0, v_0)\) = \((80, 15)\).
- White circle: \((d_0, v_0)\) = \((80, 0)\).
- \(t = 0\) in the animation corresponds to \(t = T_R\).
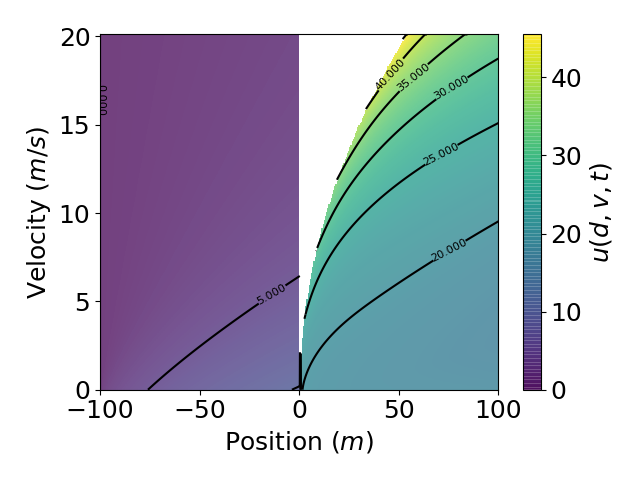
Value Function Contour Plotting:
This section displays two snapshots of the value function contours during the red-light phase.
- \(u(d,v,t) = + \infty\) at all \((d,v) \in \mathcal{I}_R(t)\)
\(u(d,v,t)\) at \(t = T_R\):
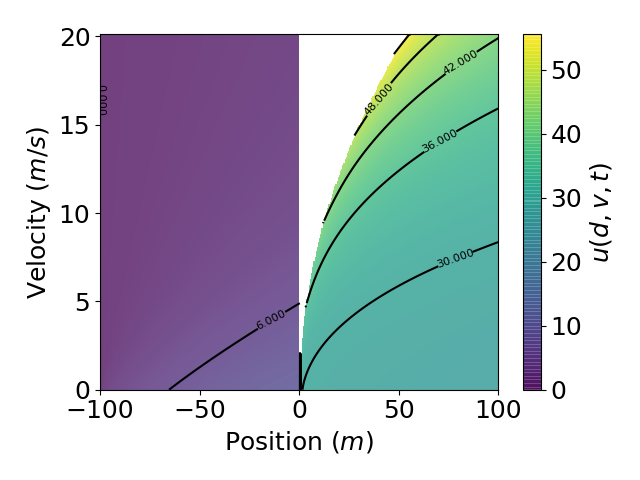
\(u(d,v,t)\) at \(t = T_R + 30s\):